|
[Research Interests] ◇ Design and control of parallel-kinematic manipulators ◇ Kinematic and dynamic analyses using the screw theory ◇ Mechanism design and prototype development ◇ Position/force control using a compliant device ◇ Haptic devices and Tele-operation ◇ Robot calibration and MEMS devices
[Development of Parallel-kinematic Robots and Others]
(1) 6-DOF parallel manipulator with very high precision ◇ The well-known Gough-Stewart platform structure is employed. ◇ Commercial ballscrew-type linear actuators (THK linear actuator: KR33-06A+400L-P0) are used instead of non-commercial telescopic ones. ◇ Precise ball-socket joints (Hephaist’s spherical rolling joints) are used. ◇ High Repeatability: ±10um ◇ 6-axis PC-based controller is developed.
◇ Kinematic Dimensions: ◇ Video Clips: Basic Motion1, Repeatability Test1
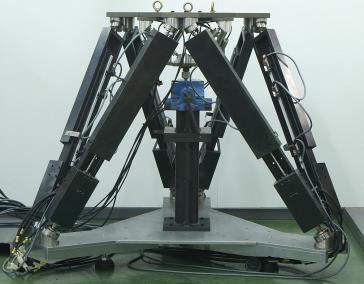
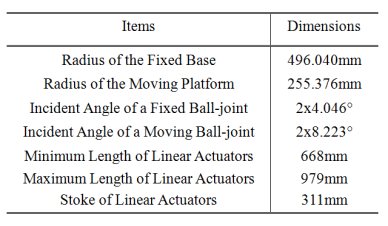
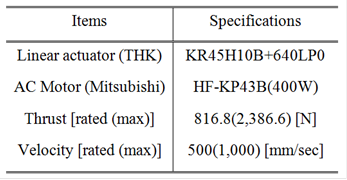
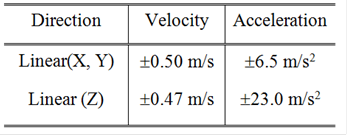
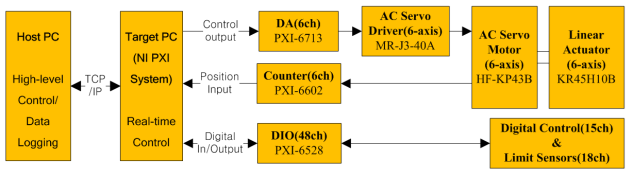
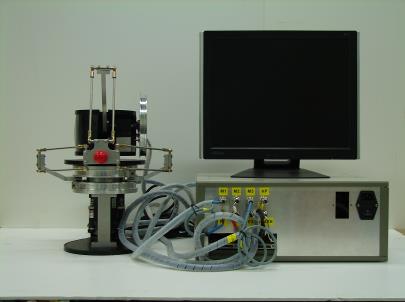
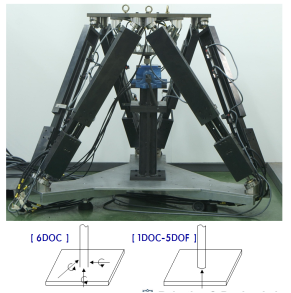
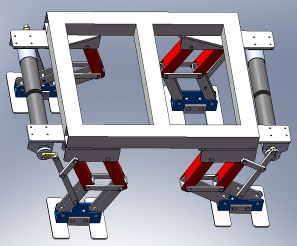
(2) 6-DOF motion simulator for one person ◇ 6-PSU (Prismatic-Spherical-Universal) parallel-kinematic manipulator is employed. ◇ General motion generation and low-frequency vibrator (3 translational and 3 rotational directions). ◇ Easy fabrication, large force generation along the x- and y- axes.
◇ Specifications:
◇ PC-based Controller:
◇ Video Clips:
(3) 3-DOF haptic device ◇ High stiffness and high force reflection due to parallel-kinematic structure. ◇ Very large workspace (larger than 180 degrees) due to special joint arrangements.
◇ Video Clips: To be prepared...
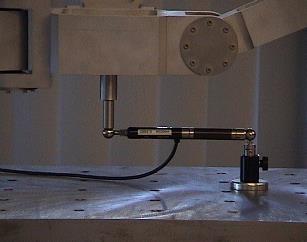
(4) 6-axis compliance device with F/T measurement capability ◇ The well-known Gough-Stewart platform structure is used. ◇ Each cylindrical leg has a spring and a linear encoder (Renishaw RGH24D, 5 um). ◇ Precise measurement of 3 forces and 3 torques is possible with 10 mN resolution. ◇ Provide enough compliance between rigid robot and rigid environment. ◇ This compliance device is used for the position/force control.
◇ Video Clips:
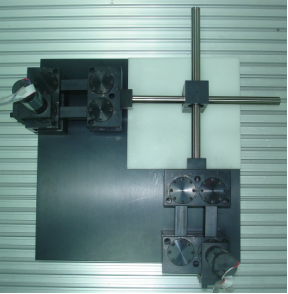
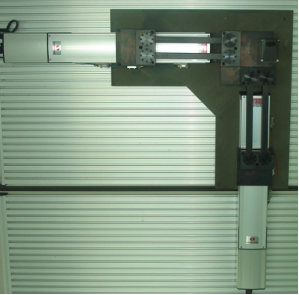
(5) Two kinds of novel 2-DOF planar parallel manipulators with translational motion ◇ 2-PaP (Parallelogram-Prismatic) and 2-PPa (Prismatic-Parallelogram) parallel manipulators are enumerated. ◇ 2-PaP parallel manipulator is driven by two rotary actuators, whereas 2-PPa parallel manipulator is driven by two linear actuators.
◇ Video Clips: To be prepared...
(6) 4-leg walking robot ◇ Each leg is made up of the six links and parallelogram and is driven by single motor. ◇ Foots are moved with very large “Delta” shape path compared to the size of legs. ◇ Simple control due to static walking
◇ Video Clips:
(7) Cartesian Parallel Manipulator (CPM) ◇ The CPM has 3-DOF and behaves like a traditional Cartesian machine. ◇ The moving platform is connected to the fixed base by 3-PRRR legs. ◇ Due to the orthogonal arrangement of three linear actuators, kinematics and control are very simple.
◇ Video Clips: Basic Motion1, Calibration1, Plotter Demo1
|










|
Welcome to Robotics and Mechanism Design Laboratory |


|
Home | People | Research | Publications | Links |